Getting Started:
Tuning Sessions:
Resources:
References:
RotorFlight Tools:
Sections:
|
|
|
|
|
Step 2 - Governor Blackbox PID Tuning
|
|
PID Tuning the Governor with Blackbox traces
Visual Identifiers:
- Oscillation noticed @ spoolup. When in hover, model shows tail vibrating rapidly. Visual affect looks like a high D-term(yaw) condition but blackbox shows "Motor 1" and "headspeed" oscillating. Goal is to fix this as a priority.
- Depending on the motor (some run hot ie; Scorpion Motors) the bell housing will have a higher temperature than usual due to the pulsating acceleration caused by the oscillation. These continuous adjustments increase the current draw through the motor, which in turn generates more heat due to electrical resistance.
- Blackbox logs show oscillations for all other gyro axis (ail/elev/yaw).
Goals of your PID Tune:
- There will be 2 parts to tuning the governor PID parameters: first, just to mitigate or remove the oscillation caused by the motor pulsating.
- 2nd part of tuning will likely be revisiting PID and FF (feed forward) to tune helicopter's reaction to heavy loads (ie; pitch pumps, tictocs, overspeed, etc)
Additional Methods:
- Check motor temperature. Higher heat may indicate oscillations are taking place.
- Tuning audibly is just as important as blackbox trace analysis. You can tell your motor is oscillating by a "trilling" sound it will make while the helicopter is hovering.
- Even if you don't hear an oscillation coming from the motor, reap the blackbox logs anyways to examine for any oscillations that are not audible.
- Use a 3-6 position switch to switch to a different profile (with each profile contianing a different P/D value) while in mid-flight to make efficient use of time.
Procedure:
- Oscillations usually occur from a high P-term or D-term condition. Determine if the oscillation is cause by either:
- High P-Term
- High D-Term
- Low D-Term (incidentally, we've seen very high D-Terms fix oscillations found in small motors).
- Spool up and listen for oscillation as headspeed increases.
- Take into the air to hover and switch to idle-1 flight mode - listen for oscillation.
- Stabilize the hover and hold for 10-20 seconds the switch to the next profile. Get a sample of 10-20 seconds of each profile. This will allow the flight controller to stablize it's PID values for the governor as you switch.
- Land and check the motor temperature. If hot, this will confirm oscillation you will notice in Blackbox.
- Reap the blacbox logs and note the PID settings you've changed in a seperate note file.
|
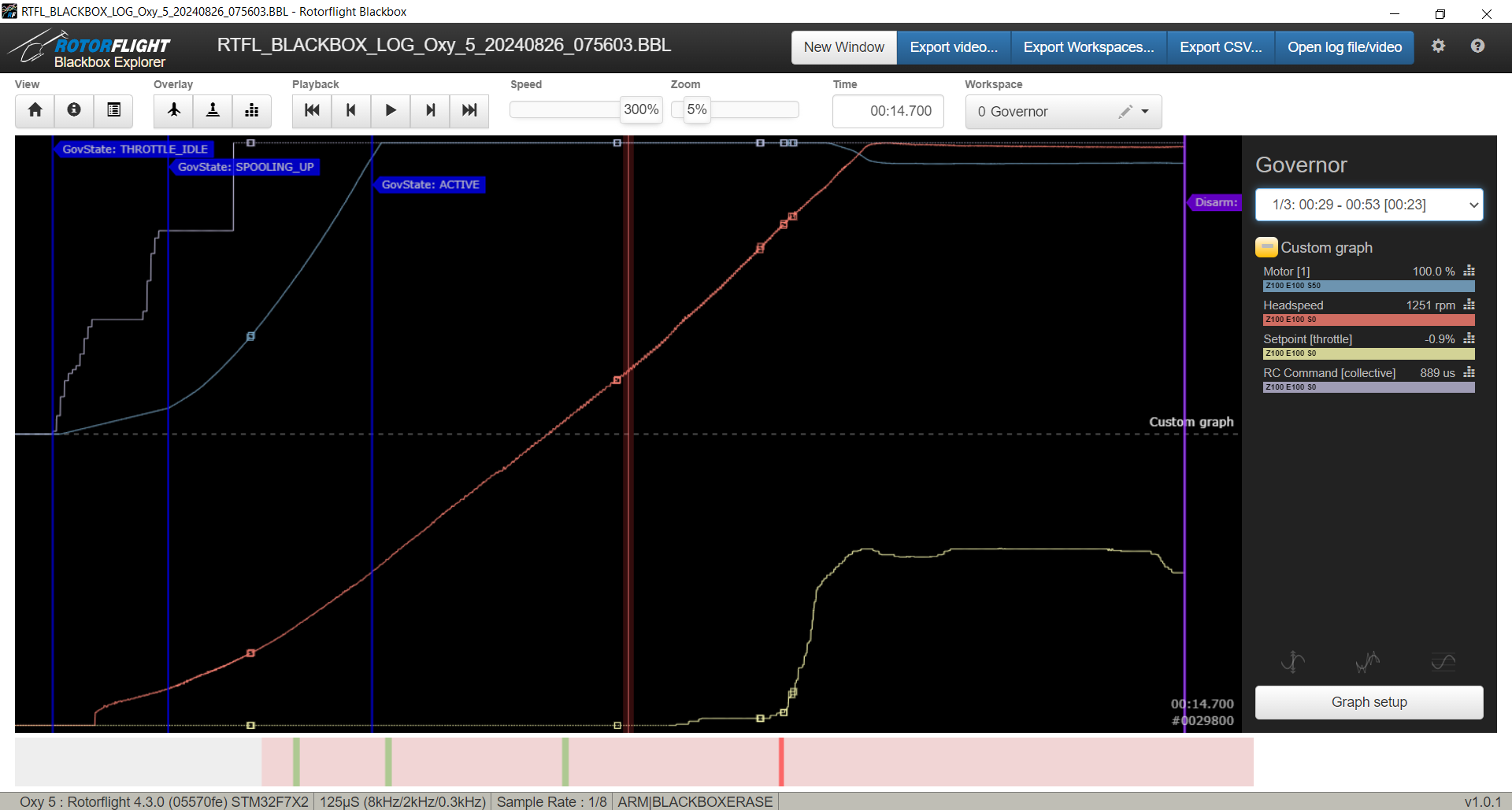
Governor PID Settings:
- P=50 (Manuf default)
- I=30 (Manuf default)
- D=0 (Manuf default)
- F=10 (Manuf default)
Comments:
- This test is a baseline of the Manufacturer default values for P, I, D and FF (Feed Forward).
- Moderate oscillations noticed (visibly/audibly) during spool up.
- Tail(Rudder) is oscillating at regular hover (This is why we decided to do this tune parameter 1st).
|
|
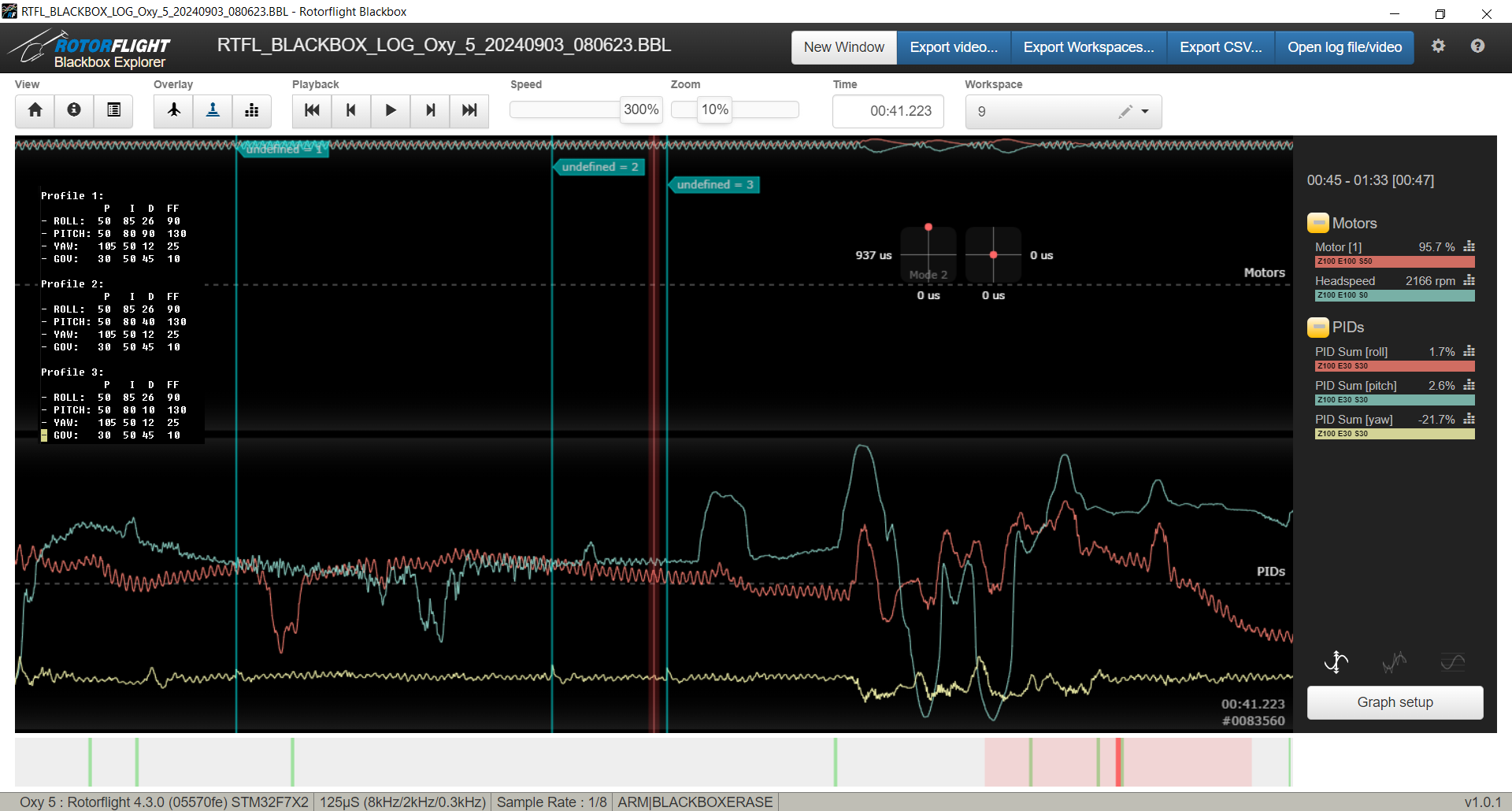
Comments:
- Notice the oscillations caused by the D-term being at 45 (top).
- Notice the oscillations are also causing the other Gyro axis to be affected.
|
|
Comments:
- Notice the oscillations have subsided once the D-term was brought back to "0".
|

|
Conclusions:
- We had to tune this parameter 1st because as you can see, this was affecting all the other axis (roll/pitch/yaw).
- The P-term was tested at a value of 40 and also caused the same type/level oscillations.
- The D-term was the most destructive of all the parameters causing abundant oscillations.
- Removing the oscillations (decreasing the D-Term and P-Term) caused the aileron, elevator, and yaw gyros to perform effectively.
- Presuming that if motor is not running smooth, then filters will be working overtime. P/D terms for Ail/Ele/Rud will be affected and appear to be a high D-term condition. This condition escpecially affects rudder since the tail rotor will also fluctuate if oscillating.
- This tuning caused the rudder to become stable with no vibration or oscillation. It also caused the rudder to stop harder after a full stick pirouette.
- This tuning caused the aileron to become stable after a "snap" manuever was executed resulting in little to no "frame shudder".
|
|
|
Step 2 - Governor Blackbox PID Tuning
|
|
|