Sections:
WebApps:
Information:
Related Resources:
|
|
|
<< Back
The tuning sequence
- Verify Filters If you tune without filters properly configured and decide later (which you should have done in the first place) to install filters, you can throw out all your tuning efforts and start over.
- Tuning the Governor: This is done first because oscillations quite frequently occur from an untuned governor PID mixture. We have actual examples of when an unbalanced governor PID causes motor oscillation. This oscillation leads to a vibration throughout the airframe that resonates into the other PID axis.
- Next, lock the tail in: Once the governor shows no signs of oscillations, it's time for your first tuning venture - The rudder. The cyclic manuevers that you will be using to tune the elevator and aileron require the tail to remain stationary. If the tail gives, then your cyclic tuning will be off.
- Cyclic Tuning: Don't just fly around to check PIDs, use specific manuevers that provoke the setpoint. This allows the gyro to leave a trace pattern that you can tune to the setpoint.
- Review and Fine Tuning: At this point, it might be good to try out PIDBench (a topic we will cover later) to fine tune and make final adjustments to your tune and have a finely tuned and professionaly built aircraft that you can be proud of.
How to identify Rotorflight Blackbox trace behavior
This is a set of tables of diagnostics organized into the category of their appropriate terms. The majority of the PID/Blackbox analysis has mostly been done by the drone communicty up to this time. This is mostly due to the fact that Blackbox Explorer and tuning via Blackbox was derived from Betaflight. With this, we've taken basic principles and combined them with analysis queues from Joshua Bardwell, Brian White (PID Toolbox), JevFPV and others from the done community and had AI (ChatGPT) provide the missing trace identifiers.
D-Term Tuning Trace Identification:
| Condition |
Description |
Trace Behavior |
| D-term too high |
The D-term is overly dampening the response, causing excessive correction and oscillations. |
- The Gyro [axis] trace will show high-frequency oscillations as the D-term overreacts to small changes.
- The PID D [axis] trace will have sharp oscillations or spikes.
- The craft may feel “twitchy” or jittery in flight, especially after sharp inputs.
|
| D-term too low |
The D-term isn't adequately smoothing out rapid changes, leading to instability. |
- The Gyro [axis] trace will overshoot the Setpoint [axis], and the system may feel loose or underdamped.
- The PID D [axis] trace will have minimal correction, often remaining flat during fast maneuvers.
|
| Oscillations in D-term |
Oscillations in the D-term indicate that the D-term value is too high. |
- You'll see excessive oscillations in the PID D [axis] trace as it tries to overcompensate.
- The Gyro [axis] trace may also reflect these oscillations, especially after aggressive inputs.
|
| D-term interacting with P-term |
When the P-term is high, the D-term may try to overcorrect, leading to additional oscillations. |
- You’ll see the PID D [axis] trace spike as it works to smooth out the aggressive P-term corrections.
- Gyro [axis] may have small oscillations, showing that D-term is compensating too aggressively.
|
| D-term behavior during snap maneuvers |
During a snap maneuver, the D-term should help prevent overshoot and control bounce-back. |
- After a snap input, the Gyro [axis] may briefly overshoot the Setpoint [axis], but the D-term should quickly correct the motion.
- Watch for bounce-back after the snap; if it’s too strong, the D-term may need adjustment.
|
P-Term Tuning Trace Identification:
| Condition |
Description |
Trace Behavior |
| P-term too high |
The system is overly aggressive in correcting errors, causing oscillations. |
- The Gyro [axis] trace will oscillate excessively around the Setpoint [axis].
- You'll see quick oscillations of the Gyro [axis] as the P-term overcorrects.
- The first leg of the Gyro [axis] trace will follow the Setpoint [axis] more closely.
- This behavior is often seen in sharp peaks and valleys in the gyro signal.
|
| P-term too low |
The system responds sluggishly to errors, leading to a slow correction. |
- The Gyro [axis] trace will lag behind the Setpoint [axis], indicating under-correction.
- The response will appear more smoothed out but with larger deviations from the setpoint.
- The craft may feel "loose" or slow to respond in flight.
|
| P-term oscillations |
Oscillations in the P-term indicate excessive or aggressive corrections. |
- The Gyro [axis] trace will show repeated oscillations around the Setpoint [axis].
- PID P [axis] will also reflect these high-frequency oscillations.
- You may see more pronounced oscillations after quick control inputs.
|
| P-term and D-term interaction |
When the P-term is high, the D-term may overcompensate by trying to smooth out the response, leading to oscillations. |
- PID D [axis] will show high-frequency oscillations as the D-term reacts to aggressive P-term corrections.
- Gyro [axis] may exhibit small, quick oscillations or appear jittery around the Setpoint [axis].
|
I-Term Tuning Trace Identification:
| Condition |
Description |
Trace Behavior |
| I-term too high |
The I-term builds up too much over time, leading to slow oscillations and a delayed response to long-term errors. |
- You’ll see slow oscillations in the Gyro [axis] trace, even when the setpoint is constant.
- The PID I [axis] trace will grow larger and then slowly decay, indicating excessive I-term accumulation.
|
| I-term too low |
Long-term errors (such as drift) are not corrected effectively. |
- The Gyro [axis] will gradually drift away from the Setpoint [axis] without returning.
- The PID I [axis] trace will remain relatively flat or small, indicating a weak correction over time.
|
| I-term oscillations |
Oscillations in the I-term reflect overaccumulation of error, often leading to sluggish corrections. |
- Slow oscillations can be seen in the Gyro [axis] trace as the I-term overcorrects for accumulated error.
- PID I [axis] will have long, undulating waves as it tries to overcorrect.
- This is more apparent in situations where the craft holds a constant attitude for a longer time.
|
| I-term and D-term interaction |
Overdamping or slow response caused by a high D-term suppressing the I-term’s ability to correct long-term errors. |
- You may notice the Gyro [axis] trace lagging after quick changes but stabilizing very slowly.
- PID D [axis] and PID I [axis] traces might appear to conflict, with the D-term suppressing small adjustments from the I-term.
|
| I-term and P-term interaction |
When the P-term is too high or low, the I-term may struggle to correct drift or accumulate too much error over time. |
- If P-term is too high, PID I [axis] might accumulate more error, resulting in slow oscillations.
- If P-term is too low, PID I [axis] will have to compensate more, causing the Gyro [axis] to drift more significantly before it stabilizes.
|
Integrated Guidelines:
- I-term too high: Can dampen the affects of P-term changes. So for example if you run a high I-Term of say "120" and try to run profiles showing the differences between P=60, P=80, P=100 - then the traces may not noticeably differ.
- Feed Forward too high: Can dampen the affects of P-term changes. So for example if you run a high Feed Forward of say "80" and try to run profiles showing the differences between P=60, P=80, P=100 - then the traces may not noticeably differ.
- D-term too high: You originally pointed out that oscillations in the PID D [axis] trace are a sign of the D-term being too high. This is a good indicator that over-damping is occurring, which causes unwanted oscillations.
- D-term too low: If the Gyro [axis] overshoots the Setpoint [axis] frequently, the D-term is likely too low, which means the system is not dampening the corrections sufficiently.
- D-term interaction with P-term: An essential guideline here is how the D-term works to smooth out aggressive P-term corrections. This relationship can lead to additional oscillations if not tuned correctly.
- D-term behavior during snap maneuvers: A critical moment to observe D-term performance is during rapid input changes like snap maneuvers, where bounce-back can indicate insufficient D damping.
- P-term(low)/D-term(high): Get high PID Error [axis], I-term accumulates (assists the P-term). This is an I-term induced bounce-back.
- P-term(high)/D-term(low): Overshoot of Setpoint [axis] (sometimes constant overshooting - as in an oscillation). You will hear an audible "trill" and can be seen in t he 'PID Sum [axis]' trace.
- Feed Forward too low: P-term/D-term have proper ratio but "Gyro [axis]" is lagging (out-of-phase) from "Setpoint [axis]"
Visual Examples:
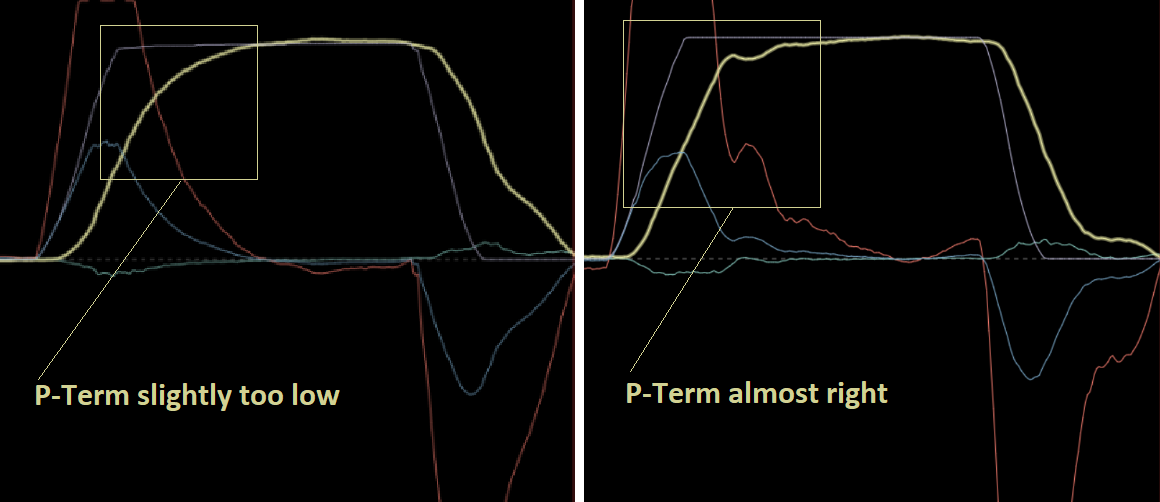
- P-Term too low seen in "Gyro [yaw]" (light purple trace) lagging (not following the shape of Setpoint) from "Setpoint [yaw]" (light yellow trace):
- D-Term too high causing oscillations (left). D-Term adjusted (lowered) to reduce oscillations (right):

- More image examples to come later..
|
|