RTFL BLACKBOX LOG Oxy 5 20240913 084933-P2Helicopters • Airplanes • Drones • Builds • Repairs • Consulting • 3D Printing |
|
| 03/04/2026: @ 08:00: page updated | |
|
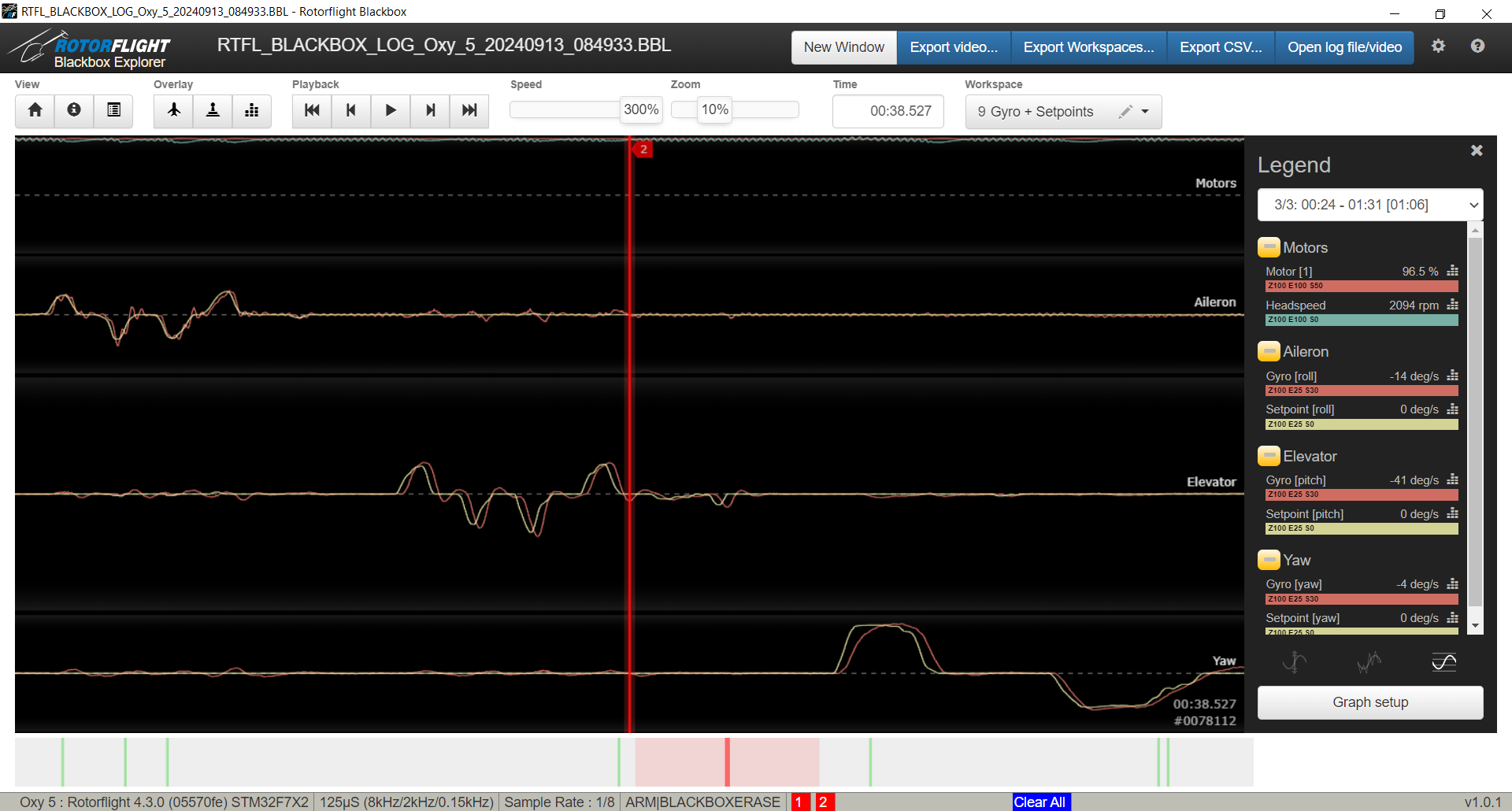
Model: Oxy 5 Date: 9/13/2024 Time: 9:05am |
||||||||||||||||||||||||||
PID Settings for this trial:
Comments:
|
Blackbox Log (Click to Enlarge):
|
|||||||||||||||||||||||||